Arduino 上手教程
2. 设备开发 & 案例程序
3. M5Unified
4. M5GFX
5. 拓展模块
Unit
Atomic
Tab5
IoT
PaperColor M5PM1 电源管理
1. 多级电源开关设计
PaperColor 内部集成 M5PM1,结合硬件电路实现了多级电源开关,不同的级别的电源开关对应控制了相关的外设与接口供电。用户可根据运行需求,切换不同级别的电源使能,关闭未使用的外设部分,实现整机低功耗。
M5PM1 驱动库
使用 M5PM1 驱动库能够非常便捷地配置 M5PM1 的引脚功能,用于低功耗唤醒以及外设供电开关。
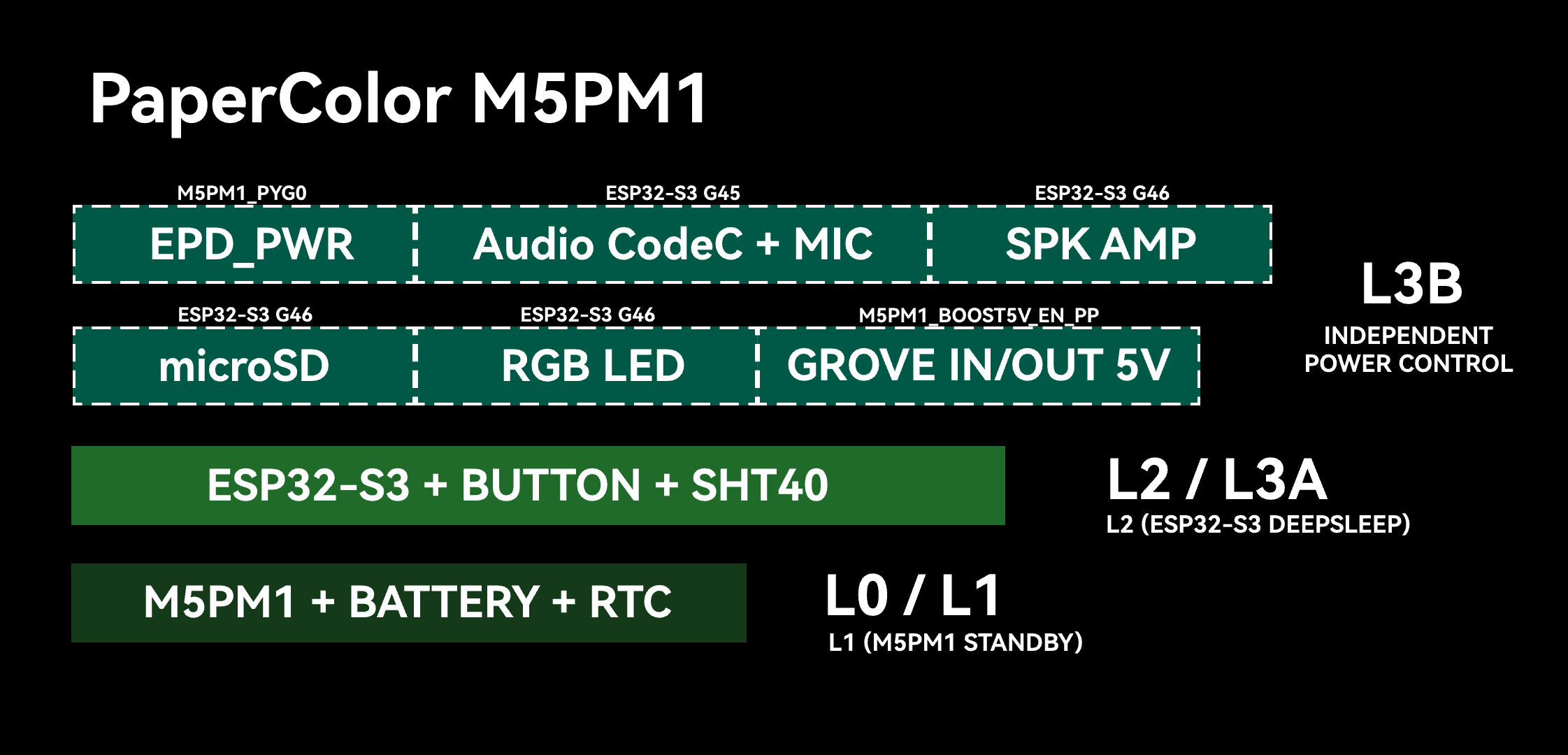
DCDC3V3_EN_PP, LDO3V3_EN_PP, CHG_EN_PP)。L0 / L1
此级电源条件下,电池保持对 M5PM1 以及 RTC 的供电。电池电量未耗尽的情况下,该层电源将一直保持,M5PM1 支持基础的按键开关机操作。
L0 层级表示 M5PM1 进入关机状态。
L1 层级时,M5PM1 处于待机状态。
L2 / L3A
此级电源条件下,将启用 ESP32-S3 主控, SHT40I 温湿度传感器, 以及用户按键上拉的电阻的供电 (3V3_L2)。
当 ESP32-S3 处于休眠状态时,电源处于 L2 级。 当 ESP32-S3 处于工作状态时,电源处于 L3A 级。
ESP32-S3 可通过控制 M5PM1 进入休眠的方式,关断自身的供电 (L2->L1/L0)。
L3B
该电源层级可通过 M5PM1 和 ESP32-S3 GPIO 进一步控制板载外设的供电。
| ESP32S3R8 | G45 |
|---|---|
| ES8311 & ES7210 Power (CODEC_3V3_L3B) | AUDIO_PWR_EN |
| ESP32S3R8 | G46 |
|---|---|
| AW8737A | SPK_EN |
- G46(SPK_EN): 扬声器功放使能
- G45(AUDIO_PWR_EN): 音频编解码芯片与麦克风供电
| M5PM1 | DCDC3V3_EN_PP | LDO3V3_EN_PP | BOOST5V_EN_PP |
|---|---|---|---|
| 3V3_L2 | PY_MPWR_EN | ||
| RGB LED | PY_RGB_PWR_EN | ||
| Grove | PY_GROVE_OUT_EN |
- DCDC3V3_EN_PP(PY_MPWR_EN): 3V3_L2 层电源开关
- LDO3V3_EN_PP(PY_RGB_PWR_EN): RGB LED 供电开关
- BOOST5V_EN_PP(PY_GROVE_OUT_EN): Grove 拓展接口供电方向控制
| M5PM1 | PYG0 | PYG2 | PYG4 | PYG3 | PYG1 |
|---|---|---|---|---|---|
| E-Paper | PY_EPD_EN | ||||
| RTC | RTC_IRQ | ||||
| microSD | PY_SD_DET_EN | PY_SD_PWR_EN | CARD_DEC |
- PYG0(PY_EPD_EN): 开启墨水屏供电
- PYG2(RTC_IRQ): RTC 中断信号
- PYG3(PY_SD_PWR_EN): microSD 模块供电
- PYG4(PY_SD_DET_EN): microSD 检测功能启用,使能上拉
- PYG1(CARD_DEC): microSD 插入检测
2. M5PM1 休眠
手动休眠
M5PM1 可通过程序手动控制进入休眠状态,来降低整机功耗。默认状态下,直接设置休眠将回退至 L0 级电源,此时仅 M5PM1 与 RTC 保持供电。
pm1.shutdown();在一些特殊的使用场景 (例如 ESP32-S3 SoC 休眠模式),允许 M5PM1 进入休眠降低的同时,保持一些层级的外设供电,用于唤醒源或是状态保持。
该类应用需要在 M5PM1 进入休眠模式前,配置对应层级的电源开关引脚状态,并激活状态保持。
I2C 空闲休眠
M5PM1 支持配置 I2C 空闲通信自动休眠状态,来降低整机功耗。进入休眠状态后,ESP32-S3 与 M5PM1 的首次通信将用于 M5PM1 唤醒,因为将通信失败,有效的通信将与唤醒后的下一次通信。
m5pm1_err_t setI2cSleepTime(uint8_t seconds);3. M5PM1 Timer 定时器
M5PM1 支持配置定时器功能,当计时结束后,执行相应的操作,如开机,关机,复位等。
m5pm1_err_t timerSet(uint32_t seconds, m5pm1_tim_action_t action);typedef enum {
M5PM1_TIM_ACTION_STOP = 0b000, // 停止,无动作
// Stop, no action
M5PM1_TIM_ACTION_FLAG = 0b001, // 仅设置标志
// Set flag only
M5PM1_TIM_ACTION_REBOOT = 0b010, // 系统复位
// System reboot
M5PM1_TIM_ACTION_POWERON = 0b011, // 开机
// Power on
M5PM1_TIM_ACTION_POWEROFF = 0b100 // 关机
// Power off
} m5pm1_tim_action_t;定时开机 / 关机案例
案例说明: 设备开机后,单击按键 A 配置 10 秒定时器触发开机事件,随后设备操作关机,等待唤醒。单击按键 B:配置 10 秒定时器触发 M5PM1 关机(可通过单击电源键重新开机)。
#include <M5Unified.h>
#include <M5PM1.h>
#include <Wire.h>
#include <Adafruit_NeoPixel.h>
static constexpr uint32_t POWERON_SECONDS = 10;
static constexpr uint32_t POWEROFF_SECONDS = 10;
static constexpr uint8_t LED_PIN = 21;
static constexpr uint8_t LED_COUNT = 2;
M5PM1 pm1;
M5Canvas canvas(&M5.Display);
Adafruit_NeoPixel pixels(LED_COUNT, LED_PIN, NEO_GRB + NEO_KHZ800);
static bool pm1_ready = false;
static void setAllLeds(uint32_t color)
{
for (uint8_t i = 0; i < LED_COUNT; ++i) {
pixels.setPixelColor(i, color);
}
pixels.show();
}
static void drawScreen(const char* status)
{
const int w = M5.Display.width();
const int h = M5.Display.height();
canvas.fillSprite(WHITE);
canvas.setTextDatum(top_center);
canvas.setTextColor(BLACK);
canvas.setFont(&fonts::FreeSansBold24pt7b);
canvas.drawString("M5PM1 TIMER", w / 2, 34);
canvas.setFont(&fonts::FreeSansBold12pt7b);
canvas.setTextColor(BLUE);
canvas.drawString("BtnA: Power ON in 10s", w / 2, 180);
canvas.drawString("BtnB: Power OFF in 10s", w / 2, 248);
canvas.setTextColor(pm1_ready ? GREEN : RED);
canvas.drawString(status, w / 2, h - 110);
canvas.pushSprite(0, 0);
}
void setup(void)
{
auto cfg = M5.config();
cfg.clear_display = false;
M5.begin(cfg);
Serial.begin(115200);
M5.Display.setEpdMode(epd_mode_t::epd_quality);
canvas.createSprite(M5.Display.width(), M5.Display.height());
m5pm1_err_t err = pm1.begin(&M5.In_I2C, M5PM1_DEFAULT_ADDR, M5PM1_I2C_FREQ_100K);
pm1_ready = (err == M5PM1_OK);
if (pm1_ready) {
pm1.setLdoEnable(true);
}
pixels.begin();
pixels.setBrightness(60);
setAllLeds(0);
if (pm1_ready) {
Serial.println("PM1 init ok");
drawScreen("PM1 ready");
setAllLeds(pixels.Color(0, 255, 0));
} else {
Serial.printf("PM1 init failed: %d\n", (int)err);
drawScreen("PM1 init failed");
setAllLeds(pixels.Color(255, 0, 0));
}
}
void loop(void)
{
M5.update();
if (!pm1_ready) {
delay(20);
return;
}
if (M5.BtnA.wasPressed()) {
Serial.printf("BtnA: timer power on in %lu s\n", POWERON_SECONDS);
setAllLeds(pixels.Color(255, 255, 0));
m5pm1_err_t err = pm1.timerSet(POWERON_SECONDS, M5PM1_TIM_ACTION_POWERON);
if (err != M5PM1_OK) {
Serial.printf("timerSet POWERON failed: %d\n", (int)err);
drawScreen("BtnA failed");
setAllLeds(pixels.Color(255, 0, 0));
}
delay(1000);
pm1.shutdown();
}
if (M5.BtnB.wasPressed()) {
Serial.printf("BtnB: timer poweroff in %lu s\n", POWEROFF_SECONDS);
setAllLeds(pixels.Color(0, 0, 255));
m5pm1_err_t err = pm1.timerSet(POWEROFF_SECONDS, M5PM1_TIM_ACTION_POWEROFF);
if (err != M5PM1_OK) {
Serial.printf("timerSet POWEROFF failed: %d\n", (int)err);
drawScreen("BtnB failed");
setAllLeds(pixels.Color(255, 0, 0));
}
}
delay(20);
}
4. RTC M5PM1 唤醒
设备开机后,单击按键 A 配置 RTC 定时唤醒并配置 M5PM1 进入休眠,此时仅维持系统最低 L0 级别供电,用于维持 IMU 和 M5PM1 工作, 待 RTC 触发唤醒信号唤醒 M5PM1 重新启动。M5PM1 唤醒后将重新运行 L1, L2, L3A 上电流程,ESP32-S3 重新执行初始化。
#include <M5Unified.h>
#include <M5PM1.h>
#include <Wire.h>
#include <Adafruit_NeoPixel.h>
static constexpr int RTC_WAKE_AFTER_SECONDS = 20;
M5Canvas canvas(&M5.Display);
M5PM1 pm1;
Adafruit_NeoPixel pixels(2, 21, NEO_GRB + NEO_KHZ800);
static bool pm1_ready = false;
static void setAllLeds(uint32_t color)
{
pixels.setPixelColor(0, color);
pixels.setPixelColor(1, color);
pixels.show();
}
static void drawScreen(const char* status, uint32_t status_color)
{
const int w = M5.Display.width();
const int h = M5.Display.height();
canvas.fillSprite(WHITE);
canvas.setTextDatum(top_center);
canvas.setFont(&fonts::FreeSansBold24pt7b);
canvas.setTextColor(BLACK);
canvas.drawString("RTC Wake PM1", w / 2, 40);
canvas.setFont(&fonts::FreeSansBold18pt7b);
canvas.setTextColor(RED);
canvas.drawString("BtnA: Shutdown", w / 2, 160);
canvas.setTextColor(BLUE);
canvas.drawString("RTC Alarm", w / 2, 270);
canvas.drawString("wakes PM1 after 10s", w / 2, 316);
canvas.setTextColor(status_color);
canvas.drawString(status, w / 2, 430);
canvas.pushSprite(0, 0);
}
void setup(void)
{
auto cfg = M5.config();
cfg.clear_display = false;
M5.begin(cfg);
Serial.begin(115200);
M5.Display.setEpdMode(epd_mode_t::epd_quality);
canvas.createSprite(M5.Display.width(), M5.Display.height());
pixels.begin();
pixels.setBrightness(80);
setAllLeds(0);
m5pm1_err_t err = pm1.begin(&M5.In_I2C, M5PM1_DEFAULT_ADDR, M5PM1_I2C_FREQ_100K);
pm1_ready = (err == M5PM1_OK);
if (pm1_ready) {
pm1.setLdoEnable(true);
setAllLeds(pixels.Color(0, 255, 0));
drawScreen("PM1 ready", GREEN);
Serial.println("PM1 initialization successful");
pm1.gpioSetWakeEnable(M5PM1_GPIO_NUM_2, true);
pm1.gpioSetWakeEdge(M5PM1_GPIO_NUM_2, M5PM1_GPIO_WAKE_FALLING); // Falling edge
} else {
setAllLeds(pixels.Color(255, 0, 0));
drawScreen("PM1 init failed", RED);
Serial.printf("PM1 initialization failed, error code: %d\n", err);
}
}
void loop(void)
{
M5.update();
if (!pm1_ready) {
delay(20);
return;
}
if (M5.BtnA.wasPressed()) {
M5.Rtc.disableIRQ();
M5.Rtc.clearIRQ();
M5.Rtc.setAlarmIRQ(RTC_WAKE_AFTER_SECONDS);
for (int i = 0; i < 3; i++) {
setAllLeds(pixels.Color(255, 0, 0));
delay(200);
setAllLeds(0);
delay(200);
}
pm1.shutdown();
}
delay(20);
}