

Arduino 上手教程
2. 设备开发 & 案例程序
3. M5Unified
4. M5GFX
5. 拓展模块
Unit
Atomic
Tab5
IoT
Stamp-S3Bat M5PM1 电源管理
1. 多级电源开关设计
Stamp-S3Bat 内部集成 M5PM1,结合硬件电路实现了多级电源开关,不同的级别的电源开关对应控制了相关的外设与接口供电。用户可根据运行需求,切换不同级别的电源使能,关闭未使用的外设部分,实现整机低功耗。
M5PM1 驱动库
使用 M5PM1 驱动库能够非常便捷地配置 M5PM1 的引脚功能,用于低功耗唤醒以及外设供电开关。
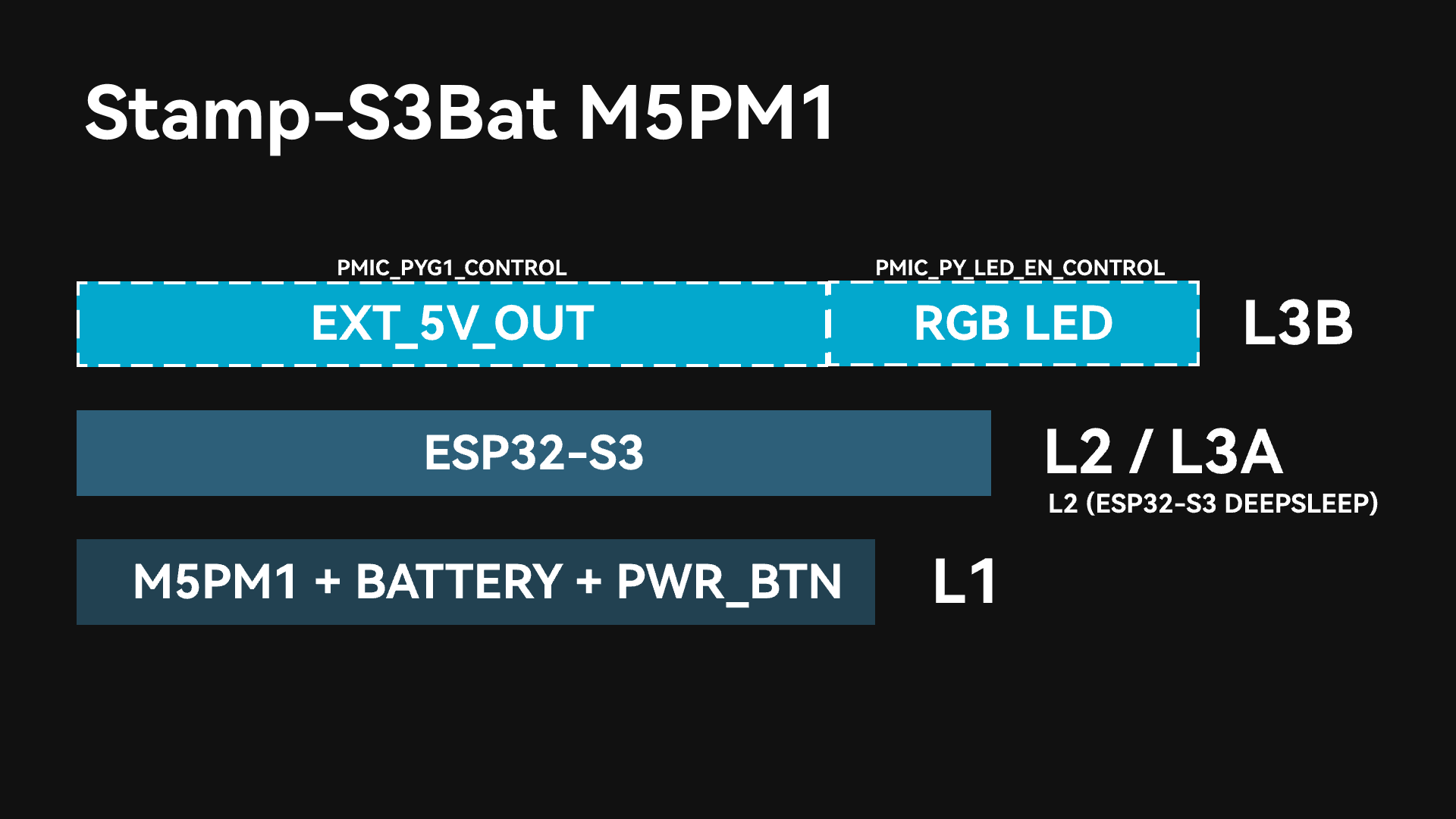
M5PM1 启动上电后 L1, L2,L3A 将自动开启 (默认打开 DCDC3V3_EN_PP, CHG_EN_PP),此时设备上的 ESP32-S3 上电完成初始化,EXT_5V_OUT 不启用输出,RGB LED 灯供电未开启。
L1
此级电源条件下,电池保持对 M5PM1 供电。电池电量未耗尽的情况下,该层电源将一直保持,M5PM1 支持基础的按键开关机操作。
L2 / L3A
此级电源条件下,将启用 ESP32-S3 主控的供电。 当 ESP32-S3 处于休眠状态时,电源处于 L2 级。当 ESP32-S3 处于工作状态时,电源处于 L3A 级。
ESP32-S3 可通过控制 M5PM1 进入休眠的方式,关断自身的供电 (L2->L1/L0)。
L3B
该电源层级可通过 M5PM1 进一步打开 EXT_5V_OUT 输出接口与 RGB LED 的供电。可通过以下 API 实现开关控制。
- 打开
EXT_5V_OUT输出:通过 PY_G1 (5VOUT_EN) 控制。
pm1.gpioSetFunc(M5PM1_GPIO_NUM_1, M5PM1_GPIO_FUNC_GPIO);
pm1.gpioSetMode(M5PM1_GPIO_NUM_1, M5PM1_GPIO_MODE_OUTPUT);
pm1.gpioSetDrive(M5PM1_GPIO_NUM_1, M5PM1_GPIO_DRIVE_PUSHPULL);
pm1.gpioSetOutput(M5PM1_GPIO_NUM_1, true);- 打开
RGB LED供电:通过 PY_LED_EN 控制。
pm1.setLedEnLevel(true)2. M5PM1 休眠
手动休眠
M5PM1 可通过程序手动控制进入休眠状态,来降低整机功耗。默认状态下,直接设置休眠将回退至 L1 级电源,此时仅 M5PM1 保持供电,无其他唤醒源的情况下,需单击 PWR 按键进行唤醒。
休眠前可配置外部唤醒 IO 或者其他唤醒源 (如定时器等),待设备进入休眠状态后,可通过唤醒源触发 M5PM1 唤醒,恢复 ESP32-S3 供电。
pm1.shutdown();IO 唤醒
Stamp‑S3Bat 运行本案例程序启动后会将 M5PM1 的 G4(WAKE)配置为唤醒 IO,关机后,拉低 WAKE 引脚产生下降沿,即可唤醒设备。
#include <Arduino.h>
#include <M5PM1.h>
#include <Wire.h>
M5PM1 pm1;
static const uint8_t PIN_SDA = 48;
static const uint8_t PIN_SCL = 47;
void setup()
{
Serial.begin(115200);
delay(300);
Wire.end();
Wire.begin(PIN_SDA, PIN_SCL, 100000U);
// Initialize PM1
m5pm1_err_t err = pm1.begin(&Wire, M5PM1_DEFAULT_ADDR, PIN_SDA, PIN_SCL, M5PM1_I2C_FREQ_100K);
if (err != M5PM1_OK) {
Serial.printf("[PM1][E] PM1 initialization failed: %d\r\n", err);
while (true) {
delay(1000);
}
}
Serial.printf("[PM1][I] PM1 initialization successful\r\n");
pm1.irqClearGpioAll();
pm1.irqClearSysAll();
pm1.irqClearBtnAll();
pm1.irqSetGpioMaskAll(M5PM1_IRQ_MASK_ENABLE);
pm1.irqSetSysMaskAll(M5PM1_IRQ_MASK_ENABLE);
pm1.irqSetBtnMaskAll(M5PM1_IRQ_MASK_ENABLE);
pm1.irqSetGpioMask(M5PM1_IRQ_GPIO4, M5PM1_IRQ_MASK_DISABLE);
pm1.gpioSetMode(M5PM1_GPIO_NUM_4, M5PM1_GPIO_MODE_INPUT);
pm1.gpioSetPull(M5PM1_GPIO_NUM_4, M5PM1_GPIO_PULL_UP);
// Configure G4 as IO wake source: low-level trigger (falling edge)
m5pm1_err_t err_wake_en = pm1.gpioSetWakeEnable(M5PM1_GPIO_NUM_4, true);
m5pm1_err_t err_wake_ed = pm1.gpioSetWakeEdge(M5PM1_GPIO_NUM_4, M5PM1_GPIO_WAKE_FALLING);
if (err_wake_en != M5PM1_OK || err_wake_ed != M5PM1_OK) {
Serial.printf("[PM1][E] GPIO wake config failed, en:%d edge:%d\r\n", err_wake_en, err_wake_ed);
while (true) {
delay(1000);
}
}
Serial.printf("[PM1][I] Shutdown now, wait GPIO4 low level to wake\r\n");
delay(1000);
m5pm1_err_t err_shutdown = pm1.shutdown();
if (err_shutdown != M5PM1_OK) {
Serial.printf("[PM1][E] shutdown failed: %d\r\n", err_shutdown);
}
}
void loop()
{
}休眠保持
在一些特殊的使用场景,允许 M5PM1 进入休眠降低的同时,且可维持芯片 GPIO 引脚的当前状态。 实现该功能时,需在 M5PM1 进入休眠前完成对应引脚状态配置,并启用 GPIO 状态保持机制。
- M5PM1 休眠,并保持
M5PM1_GPIO_NUM_1(EXT_5V_OUT) 电源输出。
pm1.gpioSetMode(M5PM1_GPIO_NUM_1, M5PM1_GPIO_MODE_OUTPUT);
pm1.gpioSetDrive(M5PM1_GPIO_NUM_1, M5PM1_GPIO_DRIVE_PUSHPULL);
pm1.gpioSetOutput(M5PM1_GPIO_NUM_1, true);
pm1.gpioSetPowerHold(M5PM1_GPIO_NUM_1, true);
Serial.println("[DEMO] GPIO1 HIGH + HOLD");
delay(1000);
Serial.println("[DEMO] Shutdown now");
delay(300);
pm1.shutdown();- M5PM1 休眠,并保持
M5PM1_GPIO_NUM_4(WAKE) 输出高电平。
pm1.gpioSetMode(M5PM1_GPIO_NUM_4, M5PM1_GPIO_MODE_OUTPUT);
pm1.gpioSetDrive(M5PM1_GPIO_NUM_4, M5PM1_GPIO_DRIVE_PUSHPULL);
pm1.gpioSetOutput(M5PM1_GPIO_NUM_4, true);
pm1.gpioSetPowerHold(M5PM1_GPIO_NUM_4, true);
Serial.println("[DEMO] GPIO4 HIGH + HOLD");
delay(1000);
Serial.println("[DEMO] Shutdown now");
delay(300);
pm1.shutdown();I2C 空闲休眠
M5PM1 支持配置 I2C 空闲通信自动休眠状态,来降低整机功耗。进入休眠状态后,ESP32-S3 与 M5PM1 的首次通信将用于 M5PM1 唤醒,因为将通信失败,有效的通信将与唤醒后的下一次通信。
m5pm1_err_t setI2cSleepTime(uint8_t seconds);3. M5PM1 Timer 定时器
M5PM1 支持配置定时器功能,当计时结束后,执行相应的操作,如开机,关机,复位等。
m5pm1_err_t timerSet(uint32_t seconds, m5pm1_tim_action_t action);typedef enum {
M5PM1_TIM_ACTION_STOP = 0b000, // 停止,无动作
// Stop, no action
M5PM1_TIM_ACTION_FLAG = 0b001, // 仅设置标志
// Set flag only
M5PM1_TIM_ACTION_REBOOT = 0b010, // 系统复位
// System reboot
M5PM1_TIM_ACTION_POWERON = 0b011, // 开机
// Power on
M5PM1_TIM_ACTION_POWEROFF = 0b100 // 关机
// Power off
} m5pm1_tim_action_t;定时开机 / 关机案例
设备上电运行这段程序后,会在 10 秒后自动关机。
#include <M5Unified.h>
#include <M5PM1.h>
#include <Wire.h>
M5PM1 pm1;
void setup(void)
{
M5.begin();
Serial.begin(115200);
auto sda = M5.getPin(m5::pin_name_t::in_i2c_sda);
auto scl = M5.getPin(m5::pin_name_t::in_i2c_scl);
Wire.end();
Wire.begin(sda, scl, 100000U);
if (pm1.begin(&Wire, M5PM1_DEFAULT_ADDR, sda, scl, M5PM1_I2C_FREQ_100K) != M5PM1_OK) {
Serial.println("PM1 init failed");
return;
}
Serial.println("Set timer: power off after 10s");
pm1.timerSet(10, M5PM1_TIM_ACTION_POWEROFF);
}
void loop(void) {
}设备执行这段程序后会立刻关机,10 秒后自动重新开机。
#include <M5Unified.h>
#include <M5PM1.h>
#include <Wire.h>
M5PM1 pm1;
void setup(void)
{
M5.begin();
Serial.begin(115200);
auto sda = M5.getPin(m5::pin_name_t::in_i2c_sda);
auto scl = M5.getPin(m5::pin_name_t::in_i2c_scl);
Wire.end();
Wire.begin(sda, scl, 100000U);
if (pm1.begin(&Wire, M5PM1_DEFAULT_ADDR, sda, scl, M5PM1_I2C_FREQ_100K) != M5PM1_OK) {
Serial.println("PM1 init failed");
return;
}
Serial.println("Set timer: power on after 10s");
pm1.timerSet(10, M5PM1_TIM_ACTION_POWERON);
pm1.shutdown(); // Must enter shutdown first, then PM1 can wake it up by timer.
}
void loop(void) {
}4. RGB LED 控制
#include <Arduino.h>
#include <M5PM1.h>
#include <Wire.h>
M5PM1 pm1;
#define PIN_SCL 47
#define PIN_SDA 48
static const uint8_t LED_COUNT = 1;
static const uint8_t BRIGHTNESS = 64;
static const m5pm1_rgb_t COLOR_GREEN = {0, BRIGHTNESS, 0};
void setup()
{
Serial.begin(115200);
delay(2000);
Wire.end();
Wire.begin(PIN_SDA, PIN_SCL, 100000U);
// Initialize PM1
m5pm1_err_t err = pm1.begin(&Wire, M5PM1_DEFAULT_ADDR, PIN_SDA, PIN_SCL, M5PM1_I2C_FREQ_400K);
if (err != M5PM1_OK) {
Serial.printf("[PM1][E] PM1 initialization failed: %d\r\n", err);
while (true) {
delay(1000);
}
}
Serial.printf("[PM1][I] PM1 initialization successful\r\n");
// Configure PM1 GPIO0 for LED output path.
pm1.gpioSetFunc(M5PM1_GPIO_NUM_0, M5PM1_GPIO_FUNC_OTHER);
pm1.gpioSetDrive(M5PM1_GPIO_NUM_0, M5PM1_GPIO_DRIVE_PUSHPULL);
pm1.gpioSetOutput(M5PM1_GPIO_NUM_0, true);
pm1.pinMode(M5PM1_GPIO_NUM_0, M5PM1_OTHER);
// Enable LED output and set LED count.
m5pm1_err_t err1 = pm1.setLedEnLevel(true);
if (err1 != M5PM1_OK) {
Serial.printf("[PM1][E] Failed to enable LED output: %d\r\n", err1);
}
m5pm1_err_t err2 = pm1.setLedCount(LED_COUNT);
if (err2 != M5PM1_OK) {
Serial.printf("[PM1][E] Failed to set LED count: %d\r\n", err2);
}
// Keep LED solid green.
m5pm1_err_t err3 = pm1.setLedColor(0, COLOR_GREEN);
m5pm1_err_t err4 = pm1.refreshLeds();
if (err3 != M5PM1_OK || err4 != M5PM1_OK) {
Serial.printf("[PM1][E] Failed to set GREEN LED, color:%d refresh:%d\r\n", err3, err4);
}
}
void loop()
{
delay(1000);
}5. 充电控制
通过 PY_G3_CHG_PROG 切换充电 IC 对电池的充电电流 (低电平: 650mA / 浮空: 200mA)
将宏定义 CHARGE_CURRENT_650MA_ENABLED 置 1,即可启用 650mA 大电流充电模式。
#include <Arduino.h>
#include <M5PM1.h>
#include <Wire.h>
M5PM1 pm1;
#define PIN_SCL 47
#define PIN_SDA 48
#define CHARGE_CURRENT_650MA_ENABLED 1
static const uint8_t LED_COUNT = 1;
static const uint8_t LED_BRIGHTNESS = 64;
static const m5pm1_gpio_num_t PY_G3_CHG_PROG = M5PM1_GPIO_NUM_3;
#if CHARGE_CURRENT_650MA_ENABLED
static const m5pm1_rgb_t LED_COLOR = {0, LED_BRIGHTNESS, 0};
#else
static const m5pm1_rgb_t LED_COLOR = {0, 0, LED_BRIGHTNESS};
#endif
static bool applyChargeCurrentConfig()
{
#if CHARGE_CURRENT_650MA_ENABLED
return pm1.gpioSetMode(PY_G3_CHG_PROG, M5PM1_GPIO_MODE_OUTPUT) == M5PM1_OK &&
pm1.gpioSetPull(PY_G3_CHG_PROG, M5PM1_GPIO_PULL_NONE) == M5PM1_OK &&
pm1.gpioSetOutput(PY_G3_CHG_PROG, false) == M5PM1_OK;
#else
return pm1.gpioSetMode(PY_G3_CHG_PROG, M5PM1_GPIO_MODE_INPUT) == M5PM1_OK &&
pm1.gpioSetPull(PY_G3_CHG_PROG, M5PM1_GPIO_PULL_NONE) == M5PM1_OK;
#endif
}
static bool applyRgbLedConfig()
{
bool ok = pm1.gpioSetFunc(M5PM1_GPIO_NUM_0, M5PM1_GPIO_FUNC_OTHER) == M5PM1_OK &&
pm1.gpioSetDrive(M5PM1_GPIO_NUM_0, M5PM1_GPIO_DRIVE_PUSHPULL) == M5PM1_OK &&
pm1.gpioSetOutput(M5PM1_GPIO_NUM_0, true) == M5PM1_OK;
pm1.pinMode(M5PM1_GPIO_NUM_0, M5PM1_OTHER);
return ok && pm1.setLedEnLevel(true) == M5PM1_OK && pm1.setLedCount(LED_COUNT) == M5PM1_OK &&
pm1.setLedColor(0, LED_COLOR) == M5PM1_OK && pm1.refreshLeds() == M5PM1_OK;
}
void setup()
{
delay(200);
Wire.end();
Wire.begin(PIN_SDA, PIN_SCL, 100000U);
m5pm1_err_t err = pm1.begin(&Wire, M5PM1_DEFAULT_ADDR, PIN_SDA, PIN_SCL, M5PM1_I2C_FREQ_400K);
pm1.setChargeEnable(true);
if (err != M5PM1_OK) {
while (true) {
delay(1000);
}
}
if (!applyChargeCurrentConfig()) {
while (true) {
delay(1000);
}
}
if (!applyRgbLedConfig()) {
while (true) {
delay(1000);
}
}
}
void loop()
{
delay(1000);
}6. 电源状态
读取 Stamp-S3Bat 当前电源状态。
#include <Arduino.h>
#include <M5PM1.h>
#include <Wire.h>
M5PM1 pm1;
static const uint8_t PIN_SCL = 47;
static const uint8_t PIN_SDA = 48;
static const uint32_t PRINT_INTERVAL_MS = 2000;
static void printVoltages()
{
uint16_t mv = 0;
if (pm1.readVref(&mv) == M5PM1_OK) {
Serial.printf("[PM1][I] Vref: %u mV (%.3f V)\r\n", mv, mv / 1000.0f);
}
if (pm1.readVbat(&mv) == M5PM1_OK) {
Serial.printf("[PM1][I] VBAT: %u mV (%.3f V)\r\n", mv, mv / 1000.0f);
}
if (pm1.readVin(&mv) == M5PM1_OK) {
Serial.printf("[PM1][I] VIN: %u mV (%.3f V)\r\n", mv, mv / 1000.0f);
}
if (pm1.read5VInOut(&mv) == M5PM1_OK) {
Serial.printf("[PM1][I] 5V IN/OUT: %u mV (%.3f V)\r\n", mv, mv / 1000.0f);
}
}
void setup()
{
Serial.begin(115200);
delay(300);
Serial.println("[DEMO] Boot");
Wire.end();
Wire.begin(PIN_SDA, PIN_SCL, 100000U);
if (pm1.begin(&Wire, M5PM1_DEFAULT_ADDR, PIN_SDA, PIN_SCL, M5PM1_I2C_FREQ_400K) != M5PM1_OK) {
Serial.println("[DEMO] PM1 init failed");
return;
}
Serial.println("[DEMO] PM1 init ok");
}
void loop()
{
static uint32_t lastMs = 0;
if (millis() - lastMs >= PRINT_INTERVAL_MS) {
lastMs = millis();
printVoltages();
}
}