


Arduino 上手教程
2. 设备开发 & 案例程序
3. M5Unified
4. M5GFX
5. 拓展模块
Unit
Atomic
Tab5
IoT
StopWatch M5PM1 & M5IOE1 电源管理
1. 多级电源开关设计
StopWatch 内部集成 M5PM1 + M5IOE1,结合硬件电路实现了多级电源开关,不同的级别的电源开关对应控制了相关的外设与接口供电。用户可根据运行需求,切换不同级别的电源使能,关闭未使用的外设部分,实现整机低功耗。
M5PM1 / M5IOE1 驱动库
使用 M5PM1 / M5IOE1 驱动库能够非常便捷地配置 M5PM1 / M5IOE1 的引脚功能,用于低功耗唤醒以及外设供电开关。
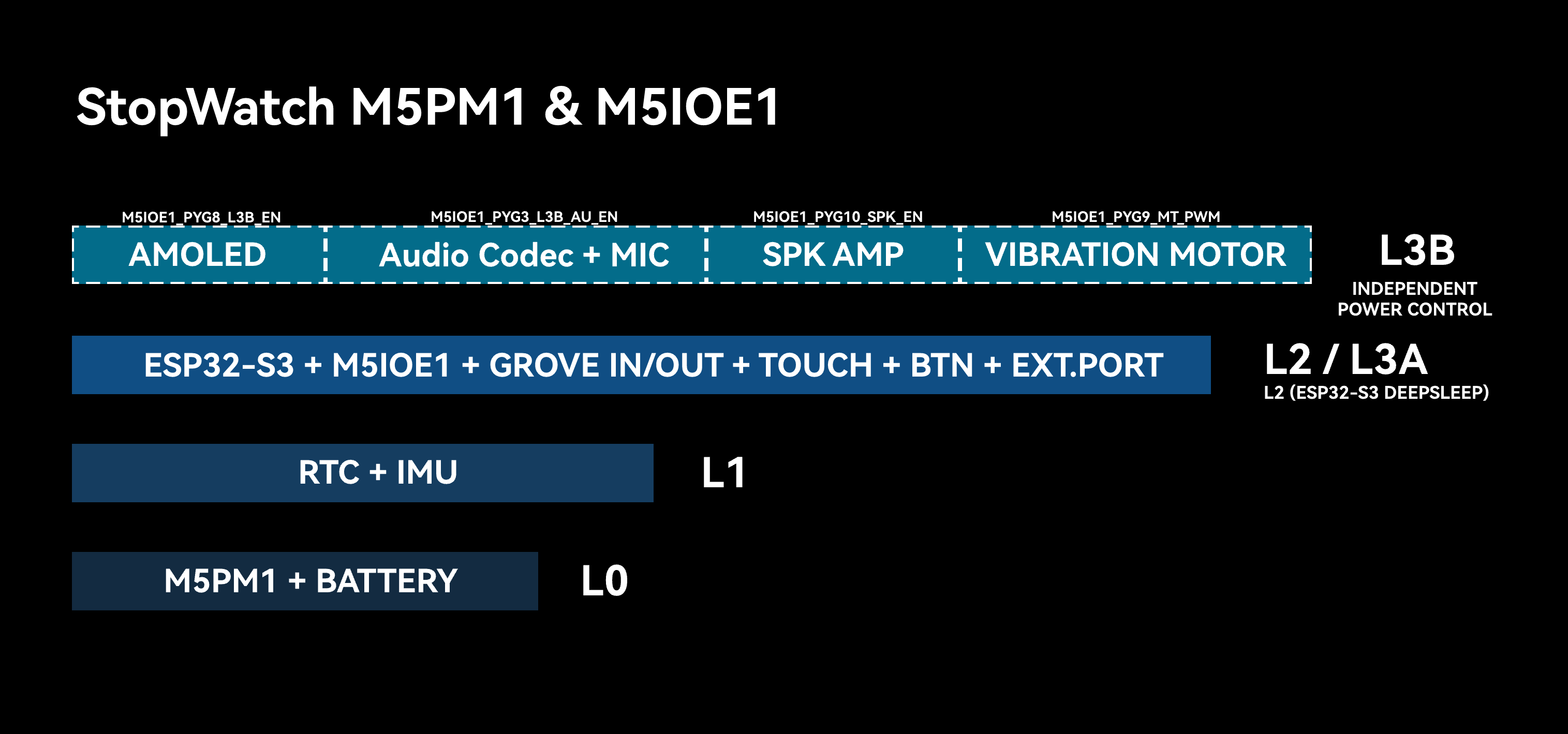
DCDC3V3_EN_PP, LDO3V3_EN_PP, CHG_EN_PP),在 M5Unified 初始化流程中,将进一步控制 M5IOE1 打开 L3B,使能其他的外设供电或使能引脚。L0
此级电源条件下,电池保持对 M5PM1 的供电。电池电量未耗尽的情况下,该层电源将一直保持,M5PM1 支持基础的按键开关机操作。
L1
启用 IMU, 以及 RTC 外设供电。该层级的电源开关使用 M5PM1 的 LDO3V3_EN_PP (PM_3V3_L1_EN),可通过以下 API 实现开关控制。
pm1.setLdoEnable(true); // L1 ON
pm1.setLdoEnable(false); // L1 OFF同时,IMU 的 INT1 中断及 RTC 的定时中断引脚连接至 M5PM1 的 PYG4,可通过配置相关的寄存器实现保持 IMU、RTC 供电,M5PM1 进入休眠状态,通过翻转设备,触发 IMU 中断(高电平有效)或 RTC 设置定时中断(低电平有效)唤醒 M5PM1。可通过以下 API 实现 IMU、RTC (L1) 供电保持。
pm1.setLdoEnable(true);
pm1.ldoSetPowerHold(true);
pm1.setLedEnLevel(true);
pm1.shutdown();L2 / L3A
此级电源条件下,将启用 ESP32-S3、Grove 接口、M5IOE1 拓展芯片、用户按键上拉供电、EXT.PORT 接口 3V3_L2 输出,以及 CH442E 开关芯片供电 (该开关芯片用于切换 EXT.PORT 接口的 MUX_IO_1/2 功能切换 UART0 / USB )。 其中 Grove 拓展接口的输入 / 输出供电,需通过 M5PM1 的 EXT_5V_EN (BOOST5V_EN_PP) 引脚进行开关控制。
当 ESP32-S3 处于休眠状态时,电源处于 L2 级。当 ESP32-S3 处于工作状态时,电源处于 L3A 级。 ESP32-S3 可通过控制 M5PM1 进入休眠的方式,关断自身的供电 (L2 -> L1/L0)。
关闭 Grove EXT_5V 接口时为输入模式,此时需要外部 5V 输入供电。无外接供电的使用场景,则可以通过以下 API 重新打开 EXT_5V 输出模式。
M5.Power.setExtOutput(true); // EXT_5V OUTPUT
// M5.Power.setExtOutput(false); // EXT_5V INPUTL3B
L3B 层级控制屏幕、扬声器、振动电机等功耗较高的外设的供电或相关配置。该层级基于 M5IOE1 IO 拓展芯片实现控制,允许独立的控制该层级的一些外设。
| M5IOE1 | PYG1 | PYG3 | PYG9 | PYG8 | PYG10 | PYG4 | PYG5 |
|---|---|---|---|---|---|---|---|
| Ext.Port Select | PYB_MUX_CTR | ||||||
| Audio L3B | PYB_AU_EN | ||||||
| Vibration Motor | PYB_MT_PWM | ||||||
| 3V3_L3B | PYB_L3B_EN | ||||||
| Speaker AMP AW8737A | PYB_SPK_EN | ||||||
| Touch | PYB_TP_RST | ||||||
| AMOLED | PYB_OLED_RST |
- PYG1(PYB_MUX_CTR): 背部拓展接口 MUX_IO_1/2 切换
USB / UART功能 - PYG3(PYB_AU_EN): ES8311 供电 + MIC 供电
- PYG9(PYB_MT_PWM): 振动电机 PWM 信号
- PYG8(PYB_L3B_EN): AMOLED 屏幕供电
- PYG10(PYB_SPK_EN): AW8737A 扬声器功放使能
- PYG4(PYB_TP_RST): 屏幕触摸复位
- PYG5(PYB_OLED_RST): 屏幕显示复位
具体的外设供电控制,通过下方 M5IOE1 的 API 进行独立控制:
ioe1.pinMode(M5IOE1_PIN_1, OUTPUT);
ioe1.digitalWrite(M5IOE1_PIN_1, LOW);2. M5PM1 休眠
手动休眠
M5PM1 可通过程序手动控制进入休眠状态,来降低整机功耗。默认状态下,直接设置休眠将回退至 L0 级电源,此时仅 M5PM1 保持供电。
pm1.shutdown();在一些特殊的使用场景 (例如 IMU 唤醒,或是 ESP32-S3 SoC 休眠),允许 M5PM1 进入休眠降低的同时,保持一些层级的外设供电,用于唤醒源或是状态保持。
该类应用需要在 M5PM1 进入休眠模式前,配置对应层级的电源开关引脚状态,并激活状态保持。
I2C 空闲休眠
M5PM1 支持配置 I2C 空闲通信自动休眠状态,来降低整机功耗。进入休眠状态后,ESP32-S3 与 M5PM1 的首次通信将用于 M5PM1 唤醒,因此将通信失败,有效的通信将在唤醒后的下一次通信中完成。
m5pm1_err_t setI2cSleepTime(uint8_t seconds);3. M5PM1 Timer 定时器
M5PM1 支持配置定时器功能,当计时结束后,执行相应的操作,如开机,关机,复位等。
m5pm1_err_t timerSet(uint32_t seconds, m5pm1_tim_action_t action);typedef enum {
M5PM1_TIM_ACTION_STOP = 0b000, // 停止,无动作
// Stop, no action
M5PM1_TIM_ACTION_FLAG = 0b001, // 仅设置标志
// Set flag only
M5PM1_TIM_ACTION_REBOOT = 0b010, // 系统复位
// System reboot
M5PM1_TIM_ACTION_POWERON = 0b011, // 开机
// Power on
M5PM1_TIM_ACTION_POWEROFF = 0b100 // 关机
// Power off
} m5pm1_tim_action_t;定时开机 / 关机案例
案例说明:设备开机后,单击按键 A 配置 10s 定时器触发重新开机,单击按键 B 配置 10s 后定时器触发 M5PM1 关机 (可通过单击电源按键重新开机)。
#include <M5Unified.h>
#include <M5PM1.h>
M5PM1 pm1;
void setup(void)
{
M5.begin();
Serial.begin(115200);
// Initialize PM1
m5pm1_err_t err = pm1.begin(&M5.In_I2C, M5PM1_DEFAULT_ADDR, M5PM1_I2C_FREQ_100K);
if (err == M5PM1_OK) {
Serial.println("PM1 initialization successful");
} else {
Serial.printf("PM1 initialization failed, error code: %d\n", err);
}
pm1.setSingleResetDisable(false);
M5.Display.fillScreen(BLACK);
M5.Display.setTextColor(WHITE);
M5.Display.setTextFont(&fonts::FreeMonoBold12pt7b);
M5.Display.setCursor(80, 150);
M5.Display.println("Timer Power Test");
M5.Display.println(" BtnA: After 10s ON");
M5.Display.println(" BtnB: After 10s OFF");
}
void loop(void)
{
M5.update();
if (M5.BtnA.wasPressed()) {
M5.Display.fillScreen(BLACK);
M5.Display.setCursor(40, 80);
M5.Display.println("Shutdown");
M5.Display.println(" After 10s");
M5.Display.println(" Power ON");
delay(500);
pm1.timerSet(10, M5PM1_TIM_ACTION_POWERON);
pm1.shutdown();
}
if (M5.BtnB.wasPressed()) {
M5.Display.fillScreen(BLACK);
M5.Display.setCursor(40, 80);
M5.Display.println(" After 10s");
M5.Display.println(" Power OFF");
delay(500);
pm1.timerSet(10, M5PM1_TIM_ACTION_POWEROFF);
}
} 4. IMU 唤醒
BMI270 驱动库
IMU M5PM1 唤醒
电源切换至 L1 Mode, 整机仅 IMU、RTC 和 M5PM1 处于供电状态。在配置 IMU 唤醒功能后,M5PM1 也进入休眠状态,同时保持 L1 的输出供电 (3V3_L1_EN),用于维持 IMU 工作。
此时可通过翻转或移动设备,触发 IMU 唤醒信号,唤醒 M5PM1 重新启动。
M5PM1 唤醒后将重新运行 L0、L1 和 L2 上电流程。ESP32-S3 重新执行初始化。
案例说明:设备开机后,单击按键 A 配置 IMU 中断模式与 M5PM1 L1 电源保持,M5PM1 进入休眠。 此时翻转或移动设备即可触发 M5PM1 唤醒,ESP32-S3 重新上电。
#include <M5Unified.h>
#include <M5PM1.h>
#include <Wire.h>
#include "SparkFun_BMI270_Arduino_Library.h"
BMI270 imu;
M5PM1 pm1;
void setup(void)
{
M5.begin();
Serial.begin(115200);
Wire1.setPins(M5.getPin(m5::pin_name_t::in_i2c_sda), M5.getPin(m5::pin_name_t::in_i2c_scl));
// Initialize PM1
m5pm1_err_t err = pm1.begin(&M5.In_I2C, M5PM1_DEFAULT_ADDR, M5PM1_I2C_FREQ_100K);
if (err == M5PM1_OK) {
Serial.println("PM1 initialization successful");
pm1.gpioSetWakeEnable(M5PM1_GPIO_NUM_0, true);
pm1.gpioSetWakeEdge(M5PM1_GPIO_NUM_0, M5PM1_GPIO_WAKE_FALLING); // Falling edge
} else {
Serial.printf("PM1 initialization failed, error code: %d\n", err);
}
pm1.setSingleResetDisable(false);
// Check if sensor is connected and initialize
// Address defaults to 0x68)
while(imu.beginI2C(BMI2_I2C_PRIM_ADDR, Wire1) != BMI2_OK)
{
Serial.println("Error: BMI270 not connected, check wiring and I2C address!");
delay(1000);
}
imu.disableFeature(BMI2_ANY_MOTION);
Serial.println("BMI270 initialization successful");
M5.Display.setFont(&fonts::FreeMonoBold12pt7b);
M5.Display.clear();
M5.Display.setCursor(40, 100);
M5.Display.printf("IMU Wakeup Test\n\n");
M5.Display.println(" Press BtnA to Sleep");
M5.Display.println(" Shake to wake up");
}
void loop(void)
{
M5.update();
if (M5.BtnA.wasPressed()) {
int8_t ret = imu.enableFeature(BMI2_ANY_MOTION);
// Optional
// bmi2_sens_config config;
// config.type = BMI2_ANY_MOTION;
// config.cfg.any_motion.threshold = 0xA0;// 1LSB equals to 0.48mg. Default is 83mg. Lower is more sensitive
// config.cfg.any_motion.duration = 0x0A; // 1LSB equals 20ms. Default is 100ms.
// ret |= imu.setConfig(config);
//
bmi2_int_pin_config intPinConfig;
intPinConfig.pin_type = BMI2_INT1;
intPinConfig.int_latch = BMI2_INT_NON_LATCH;
intPinConfig.pin_cfg[0].lvl = BMI2_INT_ACTIVE_LOW;
intPinConfig.pin_cfg[0].od = BMI2_INT_PUSH_PULL;
intPinConfig.pin_cfg[0].output_en = BMI2_INT_OUTPUT_ENABLE;
intPinConfig.pin_cfg[0].input_en = BMI2_INT_INPUT_DISABLE;
ret |= imu.setInterruptPinConfig(intPinConfig);
ret |= imu.mapInterruptToPin(BMI2_ANY_MOTION_INT, BMI2_INT1);
if (!ret){
Serial.println("BMI270 AnyMotionInterrupt enabled successfully");
} else {
Serial.println("Failed to enable BMI270 AnyMotionInterrupt");
}
M5.Display.clear();
M5.Display.setCursor(40, 100);
M5.Display.println("Power OFF");
delay(1000);
// Shutdown
pm1.setLdoEnable(true);
pm1.ldoSetPowerHold(true);
pm1.setLedEnLevel(true);
pm1.shutdown();
}
}例程效果演示:
IMU ESP32-S3 唤醒
M5PM1 的 PYG1_IRQ 引脚在电路上连接到了 ESP32-S3 的 G12 上,可以通过链式的唤醒信号实现 ESP32-S3 唤醒,实现步骤如下:
- 配置 M5PM1 PYG0 为输入模式,该引脚连接 IMU 的 INT1 输出信号。
- 配置 M5PM1 PYG1_IRQ 为 IRQ 输出信号引脚。当 PYG0 (IMU 产生中断信号) 引脚状态变化时, PYG1_IRQ 引脚将输出中断信号
- 配置 ESP32-S3 进入休眠,配置唤醒引脚为 G12
- 翻转或移动设备:触发 IMU 唤醒信号 -> 触发 M5PM1 PYG1_IRQ -> 唤醒 ESP32-S3
案例说明:设备开机后,单击按键 A 配置 IMU 中断模式。翻转或移动设备即可触发 GPIO 中断处理函数。再次单击按键 A 可清除 M5PM1 IRQ 标志位,再次进行测试。
#include <M5Unified.h>
#include <M5PM1.h>
#include <Wire.h>
#include "SparkFun_BMI270_Arduino_Library.h"
#include "driver/rtc_io.h"
BMI270 imu;
M5PM1 pm1;
void setup(void)
{
M5.begin();
Serial.begin(115200);
Wire1.setPins(M5.getPin(m5::pin_name_t::in_i2c_sda), M5.getPin(m5::pin_name_t::in_i2c_scl));
// Initialize PM1
m5pm1_err_t err = pm1.begin(&M5.In_I2C, M5PM1_DEFAULT_ADDR, M5PM1_I2C_FREQ_100K);
if (err == M5PM1_OK) {
Serial.println("PM1 initialization successful");
pm1.irqClearGpioAll();
pm1.irqClearSysAll();
pm1.irqClearBtnAll();
pm1.irqSetGpioMaskAll(M5PM1_IRQ_MASK_ENABLE);
pm1.irqSetSysMaskAll(M5PM1_IRQ_MASK_ENABLE);
pm1.irqSetBtnMaskAll(M5PM1_IRQ_MASK_ENABLE);
pm1.irqSetGpioMask(M5PM1_IRQ_GPIO0, M5PM1_IRQ_MASK_DISABLE);
pm1.gpioSetMode(M5PM1_GPIO_NUM_0, M5PM1_GPIO_MODE_INPUT);
pm1.gpioSetPull(M5PM1_GPIO_NUM_0, M5PM1_GPIO_PULL_UP);
pm1.gpioSetMode(M5PM1_GPIO_NUM_1, M5PM1_GPIO_MODE_OUTPUT);
pm1.gpioSetDrive(M5PM1_GPIO_NUM_1, M5PM1_GPIO_DRIVE_PUSHPULL);
pm1.gpioSetFunc(M5PM1_GPIO_NUM_1, M5PM1_GPIO_FUNC_IRQ);
} else {
Serial.printf("PM1 initialization failed, error code: %d\n", err);
}
pm1.setSingleResetDisable(false);
// Check if sensor is connected and initialize
// Address defaults to 0x68)
while(imu.beginI2C(BMI2_I2C_PRIM_ADDR, Wire1) != BMI2_OK)
{
Serial.println("Error: BMI270 not connected, check wiring and I2C address!");
delay(1000);
}
imu.disableFeature(BMI2_ANY_MOTION);
Serial.println("BMI270 initialization successful");
M5.Display.setFont(&fonts::FreeMonoBold12pt7b);
M5.Display.clear();
M5.Display.setCursor(40, 100);
M5.Display.printf("IMU IRQ Test\n\n");
M5.Display.println(" Press BtnA to Sleep");
M5.Display.println(" Shake to wake up");
}
volatile bool pm1IrqTriggered = false;
void ARDUINO_ISR_ATTR pm1_irq_handler()
{
pm1IrqTriggered = true;
}
void loop(void)
{
M5.update();
if (pm1IrqTriggered) {
pm1IrqTriggered = false;
Serial.println("PM1 IRQ triggered");
uint16_t status = 0;
imu.getInterruptStatus(&status);
Serial.printf("BMI270 interrupt status: 0x%04X\n", status);
M5.Display.setCursor(40, 130);
M5.Display.println("PM1 IRQ triggered");
}
if (M5.BtnA.wasPressed()) {
pm1.irqClearGpioAll();
pm1.irqClearSysAll();
pm1.irqClearBtnAll();
int8_t ret = imu.enableFeature(BMI2_ANY_MOTION);
// Optional
// bmi2_sens_config config;
// config.type = BMI2_ANY_MOTION;
// ret |= imu.getConfig(&config);
// config.cfg.any_motion.threshold = 0xE0;// 1LSB equals to 0.48mg. Default is 83mg. Lower is more sensitive
// config.cfg.any_motion.duration = 0x0A; // 1LSB equals 20ms. Default is 100ms.
// ret |= imu.setConfig(config);
bmi2_int_pin_config intPinConfig;
intPinConfig.pin_type = BMI2_INT1;
intPinConfig.int_latch = BMI2_INT_NON_LATCH;
intPinConfig.pin_cfg[0].lvl = BMI2_INT_ACTIVE_HIGH;// active - high
intPinConfig.pin_cfg[0].od = BMI2_INT_PUSH_PULL;
intPinConfig.pin_cfg[0].output_en = BMI2_INT_OUTPUT_ENABLE;
intPinConfig.pin_cfg[0].input_en = BMI2_INT_INPUT_DISABLE;
ret |= imu.setInterruptPinConfig(intPinConfig);
ret |= imu.mapInterruptToPin(BMI2_ANY_MOTION_INT, BMI2_INT1);
if (!ret){
Serial.println("BMI270 AnyMotionInterrupt enabled successfully");
} else {
Serial.println("Failed to enable BMI270 AnyMotionInterrupt");
}
M5.Display.clear();
M5.Display.setCursor(40, 100);
M5.Display.println("Now Shake!");
// Choose either of the two pieces of code below.
pinMode(GPIO_NUM_12, INPUT_PULLUP);
attachInterrupt(GPIO_NUM_12, pm1_irq_handler, FALLING);
// esp_sleep_enable_ext0_wakeup(GPIO_NUM_12, 0); // 0 = Low
// rtc_gpio_pullup_en(GPIO_NUM_12);
// Serial.println("Going to sleep now");
// esp_deep_sleep_start();
}
}例程效果演示:
5. RTC 唤醒
RTC M5PM1 唤醒
电源切换至 L1 Mode, 整机仅 IMU、RTC 和 M5PM1 处于供电状态。当配置 RTC 定时唤醒功能后,M5PM1 进入休眠状态,同时保持 L1 的输出供电 (3V3_L1_EN),用于维持 RTC 工作。
此时可通过配置 RTC 定时器唤醒,触发 M5PM1 唤醒,ESP32-S3 重新上电。
M5PM1 唤醒后将重新运行 L0、L1 和 L2 上电流程。ESP32-S3 重新执行初始化。
案例说明:设备开机后,单击按键 A 配置 RTC 定时器唤醒,M5PM1 进入休眠。 5s 后触发 RTC 唤醒,ESP32-S3 重新上电。
#include <M5Unified.h>
#include <M5PM1.h>
M5PM1 pm1;
void setup(void)
{
M5.begin();
Serial.begin(115200);
// Initialize PM1
m5pm1_err_t err = pm1.begin(&M5.In_I2C, M5PM1_DEFAULT_ADDR, M5PM1_I2C_FREQ_100K);
if (err == M5PM1_OK) {
Serial.println("PM1 initialization successful");
pm1.gpioSetWakeEnable(M5PM1_GPIO_NUM_0, true);
pm1.gpioSetWakeEdge(M5PM1_GPIO_NUM_0, M5PM1_GPIO_WAKE_FALLING); // Falling edge
} else {
Serial.printf("PM1 initialization failed, error code: %d\n", err);
}
pm1.setSingleResetDisable(false);
M5.Display.setFont(&fonts::FreeMonoBold12pt7b);
M5.Display.clear();
M5.Display.setCursor(40, 100);
M5.Display.printf("RTC Wakeup Test\n\n");
M5.Display.println(" Press BtnA to Sleep");
}
void loop(void)
{
M5.update();
if (M5.BtnA.wasPressed()) {
M5.Rtc.clearIRQ();
if (M5.Rtc.setTimerIRQ(5000)){// 5s later wakeup
Serial.println("RTC IRQ enabled successfully");
M5.Display.clear();
M5.Display.setCursor(40, 100);
M5.Display.printf("Power OFF");
M5.Display.setCursor(40, 130);
M5.Display.printf("5s later wakeup");
delay(500);
// Shutdown
pm1.setLdoEnable(true);
pm1.ldoSetPowerHold(true);
pm1.setLedEnLevel(true);
pm1.shutdown();
} else {
Serial.println("Failed to enable RTC IRQ");
}
}
}例程效果演示:
RTC ESP32-S3 唤醒
RTC 唤醒配置步骤与 IMU ESP32-S3 唤醒类似,区别在于 RTC 唤醒不需要像 IMU 那样配置 BMI270 中断,但仍依赖 RTC IRQ → M5PM1 GPIO → PYG1_IRQ → ESP32-S3 G12 这条链路。
#include <M5Unified.h>
#include <M5PM1.h>
#include "driver/rtc_io.h"
M5PM1 pm1;
void setup(void) {
M5.begin();
Serial.begin(115200);
M5.Display.setFont(&fonts::FreeMonoBold12pt7b);
M5.Display.clear();
M5.Display.setCursor(40, 100);
M5.Display.printf("RTC IRQ Test\n\n");
M5.Display.println(" Press BtnA to Sleep");
// Initialize PM1
m5pm1_err_t err = pm1.begin(&M5.In_I2C, M5PM1_DEFAULT_ADDR, M5PM1_I2C_FREQ_100K);
if (err == M5PM1_OK) {
Serial.println("PM1 initialization successful");
pm1.irqClearGpioAll();
pm1.irqClearSysAll();
pm1.irqClearBtnAll();
pm1.irqSetGpioMaskAll(M5PM1_IRQ_MASK_ENABLE);
pm1.irqSetSysMaskAll(M5PM1_IRQ_MASK_ENABLE);
pm1.irqSetBtnMaskAll(M5PM1_IRQ_MASK_ENABLE);
pm1.irqSetGpioMask(M5PM1_IRQ_GPIO0, M5PM1_IRQ_MASK_DISABLE);
pm1.gpioSetMode(M5PM1_GPIO_NUM_0, M5PM1_GPIO_MODE_INPUT);
pm1.gpioSetPull(M5PM1_GPIO_NUM_0, M5PM1_GPIO_PULL_UP);
pm1.gpioSetMode(M5PM1_GPIO_NUM_1, M5PM1_GPIO_MODE_OUTPUT);
pm1.gpioSetDrive(M5PM1_GPIO_NUM_1, M5PM1_GPIO_DRIVE_PUSHPULL);
pm1.gpioSetFunc(M5PM1_GPIO_NUM_1, M5PM1_GPIO_FUNC_IRQ);
} else {
Serial.printf("PM1 initialization failed, error code: %d\n", err);
}
pm1.setSingleResetDisable(false);
delay(200);
M5.Rtc.clearIRQ();
delay(200);
}
volatile bool pm1IrqTriggered = false;
void ARDUINO_ISR_ATTR pm1_irq_handler() {
pm1IrqTriggered = true;
}
void loop(void) {
M5.update();
if (pm1IrqTriggered) {
pm1IrqTriggered = false;
M5.Rtc.setTimerIRQ(0);
M5.Rtc.clearIRQ();
pm1.irqClearGpioAll();
pm1.irqClearSysAll();
pm1.irqClearBtnAll();
Serial.println("PM1 IRQ triggered");
M5.Display.setCursor(40, 130);
M5.Display.println("PM1 IRQ triggered");
}
if (M5.BtnA.wasPressed()) {
if (M5.Rtc.setTimerIRQ(5000)){// Set Timer IRQ
Serial.println("RTC IRQ enabled successfully");
M5.Display.clear();
M5.Display.setCursor(40, 100);
M5.Display.printf("Wait for IRQ to wake up...");
// Choose either of the two pieces of code below.
pinMode(GPIO_NUM_12, INPUT_PULLUP);
attachInterrupt(GPIO_NUM_12, pm1_irq_handler, FALLING);
// esp_sleep_enable_ext0_wakeup(GPIO_NUM_12, 0); // 0 = Low
// rtc_gpio_pullup_en(GPIO_NUM_12);
// Serial.println("Going to sleep now");
// esp_deep_sleep_start();
} else {
Serial.println("Failed to enable RTC IRQ");
}
}
}例程效果演示:
6. M5IOE1 外设控制
M5IOE1 作为一个独立的 IO 拓展芯片,控制着 L3B 级电源的部分外设供电及相关配置,如屏幕、扬声器、振动电机等。通过 M5IOE1 的 API,可以独立控制这些外设,实现更灵活的电源管理。
IOE_TP_EN、IOE_OLED_RST 以及 IOE_L3B_EN 引脚进行控制,这些引脚拉低再次上电后屏幕需要再次初始化才能正常显示和触摸,请待后续 M5Unified 库更新后支持。控制 API 同理,例如可以通过 ioe1.digitalWrite(IOE_L3B_EN, LOW) 来控制 L3B 电源开关。#include <M5Unified.h>
#include <M5PM1.h>
#include <M5IOE1.h>
M5PM1 pm1;
M5IOE1 ioe1;
#define IOE_MUX_EN M5IOE1_PIN_1
#define IOE_AU_EN M5IOE1_PIN_3
#define IOE_MT_PWM M5IOE1_PIN_9
#define IOE_L3B_EN M5IOE1_PIN_8
#define IOE_SPK_EN M5IOE1_PIN_10
#define IOE_TP_EN M5IOE1_PIN_4
#define IOE_OLED_RST M5IOE1_PIN_5
void setup(void)
{
M5.begin();
Serial.begin(115200);
// Initialize PM1
m5pm1_err_t pm1_err = pm1.begin(&M5.In_I2C, M5PM1_DEFAULT_ADDR, M5PM1_I2C_FREQ_100K);
if (pm1_err == M5PM1_OK) {
Serial.println("PM1 initialization successful");
} else {
Serial.printf("PM1 initialization failed, error code: %d\n", pm1_err);
}
pm1.setSingleResetDisable(false);
// Initialize IOE1
m5ioe1_err_t ioe1_err = ioe1.begin(&M5.In_I2C, M5IOE1_DEFAULT_ADDR, M5IOE1_I2C_FREQ_100K);
if (ioe1_err == M5IOE1_OK) {
Serial.println("IOE1 initialization successful");
} else {
Serial.printf("IOE1 initialization failed, error code: %d\n", ioe1_err);
}
ioe1.pinMode(IOE_MUX_EN, OUTPUT);
ioe1.pinMode(IOE_AU_EN, OUTPUT);
ioe1.pinMode(IOE_MT_PWM, OUTPUT);
ioe1.pinMode(IOE_L3B_EN, OUTPUT);
ioe1.pinMode(IOE_SPK_EN, OUTPUT);
ioe1.pinMode(IOE_TP_EN, OUTPUT);
ioe1.pinMode(IOE_OLED_RST, OUTPUT);
ioe1.setPwmFrequency(2000);
ioe1.setPwmDuty(M5IOE1_PWM_CH1, 0);
M5.Display.setFont(&fonts::FreeMonoBold12pt7b);
M5.Display.clear();
M5.Display.setCursor(40, 100);
M5.Display.printf("IOE1 Power Test Begin\n\n");
delay(1000);
}
void loop(void)
{
M5.update();
// MUX IO
M5.Display.clear();
M5.Display.setCursor(40, 100);
M5.Display.printf("MUX IO set to UART0");
ioe1.digitalWrite(IOE_MUX_EN, LOW);
delay(1000);
M5.Display.setCursor(40, 130);
M5.Display.printf("MUX IO set to USB");
ioe1.digitalWrite(IOE_MUX_EN, HIGH);
delay(1000);
// Speaker
M5.Display.clear();
M5.Display.setCursor(40, 100);
M5.Display.printf("Speaker off");
ioe1.digitalWrite(IOE_SPK_EN, LOW);
M5.Speaker.tone(10000, 100);
M5.Display.setCursor(40, 130);
M5.Display.printf("No sound");
delay(1000);
M5.Display.setCursor(40, 160);
M5.Display.printf("1s later hear sound");
ioe1.digitalWrite(IOE_SPK_EN, HIGH);
delay(1000);
M5.Speaker.tone(4000, 200);
delay(1000);
// Vibration Motor
M5.Display.clear();
M5.Display.setCursor(40, 100);
M5.Display.printf("Motor off");
ioe1.setPwmDuty(M5IOE1_PWM_CH1, 0);
M5.Display.setCursor(40, 130);
M5.Display.printf("No vibration");
delay(1000);
M5.Display.setCursor(40, 160);
M5.Display.printf("1s vibrate");
ioe1.digitalWrite(IOE_MT_PWM, HIGH);
ioe1.setPwmDuty(M5IOE1_PWM_CH1, 50);
delay(1000);
ioe1.setPwmDuty(M5IOE1_PWM_CH1, 0);
delay(200);
// Audio
M5.Display.clear();
M5.Display.setCursor(40, 100);
M5.Display.printf("Audio off");
ioe1.digitalWrite(IOE_AU_EN, LOW);
M5.Speaker.end();
M5.Speaker.begin();
M5.Speaker.setVolume(128);
M5.Speaker.tone(10000, 100);
M5.Display.setCursor(40, 130);
M5.Display.printf("No sound");
delay(1000);
M5.Display.setCursor(40, 160);
M5.Display.printf("1s later hear sound");
ioe1.digitalWrite(IOE_AU_EN, HIGH);
M5.Speaker.end();
M5.Speaker.begin();
M5.Speaker.setVolume(128);
delay(1000);
M5.Speaker.tone(6000, 200);
delay(1000);
}成功烧录后,程序将依次演示背部拓展接口切换、扬声器、振动电机以及音频放大器的控制效果。