

Arduino入門
2. デバイス&サンプル
3. M5Unified
4. M5GFX
5. 拡張モジュール&サンプル
Unit
Atomic
Tab5
IoT
アクセサリー
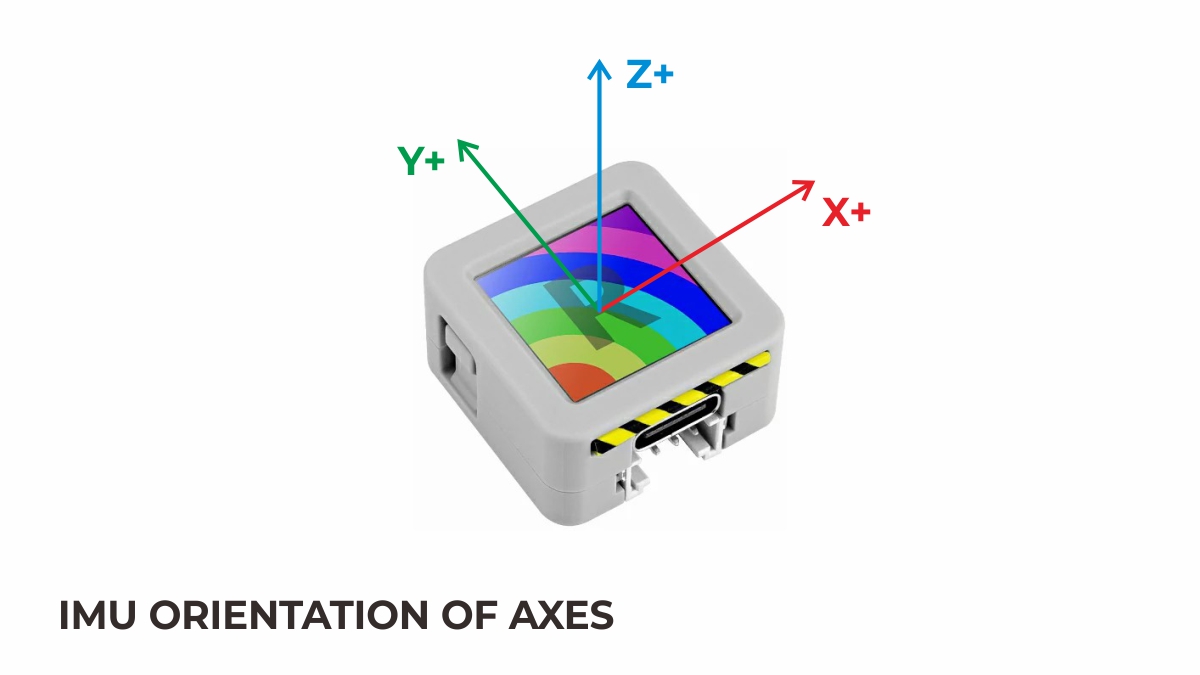
AtomS3R IMU 姿勢センサー
AtomS3R の IMU センサー入力に関する API とサンプルプログラムです。
サンプルプログラム
コンパイル要件
- M5Stack ボードマネージャ バージョン >= 3.2.2
- 開発ボードオプション = M5AtomS3R
- M5Unified ライブラリ バージョン >= 0.2.17
- M5GFX ライブラリ バージョン >= 0.2.22
cpp
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35
#include <M5Unified.h>
void setup(void) {
M5.begin();
M5.Display.setFont(&fonts::FreeMonoBold9pt7b);
Serial.begin(115200);
}
void loop(void) {
auto imu_update = M5.Imu.update();
if (imu_update) {
auto data = M5.Imu.getImuData();
// The data obtained by getImuData can be used as follows.
data.accel.x; // accel x-axis value.
data.accel.y; // accel y-axis value.
data.accel.z; // accel z-axis value.
data.accel.value; // accel 3values array [0]=x / [1]=y / [2]=z.
data.gyro.x; // gyro x-axis value.
data.gyro.y; // gyro y-axis value.
data.gyro.z; // gyro z-axis value.
data.gyro.value; // gyro 3values array [0]=x / [1]=y / [2]=z.
data.value; // all sensor 9values array [0~2]=accel / [3~5]=gyro / [6~8]=mag
Serial.printf("ax:%f ay:%f az:%f\r\n", data.accel.x, data.accel.y, data.accel.z);
Serial.printf("gx:%f gy:%f gz:%f\r\n", data.gyro.x, data.gyro.y, data.gyro.z);
M5.Display.clear();
M5.Display.setCursor(0, 0);
M5.Display.printf("ax:%.3f\nay:%.3f\naz:%.3f\r\n", data.accel.x, data.accel.y, data.accel.z);
M5.Display.printf("gx:%.3f\ngy:%.3f\ngz:%.3f\r\n", data.gyro.x, data.gyro.y, data.gyro.z);
}
delay(100);
}上記プログラムを AtomS3R に書き込むと、IMU センサーの加速度データとジャイロデータがシリアルモニタと画面にリアルタイムで出力されます。

API
AtomS3R の IMU 機能では、M5Unified ライブラリ内の IMU_Class を使用しています。より多くの IMU 関連 API については、以下のドキュメントを参照してください。
IMU 3 軸方向図
Page Tools