

Arduino入門
2. デバイス&サンプル
3. M5Unified
4. M5GFX
5. 拡張モジュール&サンプル
Unit
Atomic
Tab5
IoT
アクセサリー
Chain Encoder 使用チュートリアル
1. 準備作業
- 環境設定:IDE のインストールについては Arduino IDE 入門ガイド を参照し、使用する開発ボードに応じて必要なボードパッケージとドライバライブラリをインストールしてください。
- 使用するドライバライブラリ:
- 使用するハードウェア製品:
- Chain DualKey
- Chain Bridge や Chain Return などの Chain シリーズ用コネクタ
- Chain Encoder


2. サンプルプログラム
ビルド要件
M5Stack ボードマネージャー バージョン >= 3.2.4
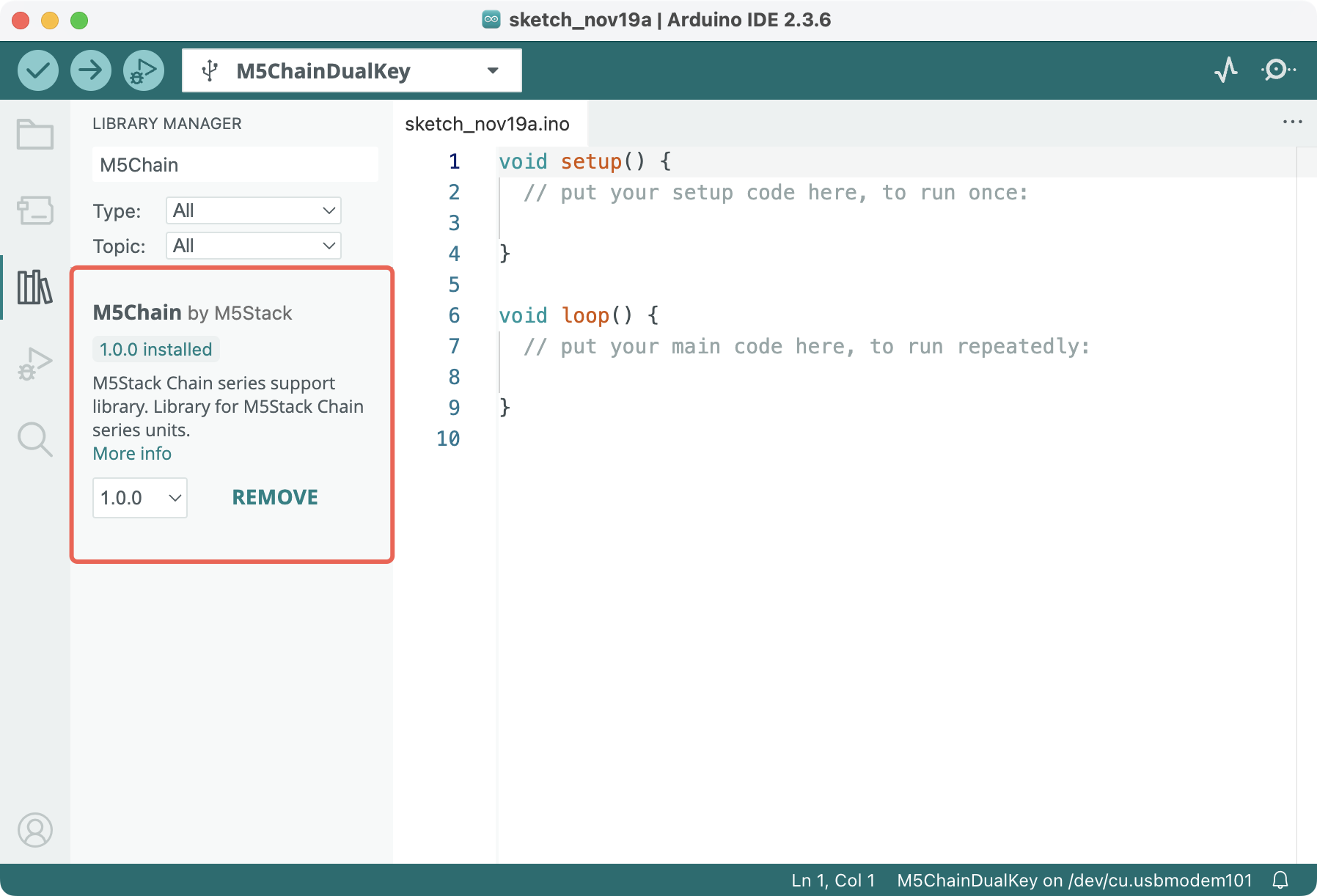
M5Chain ライブラリ バージョン >= 1.0.0
M5Chain ライブラリ バージョン >= 1.0.0
cpp
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81
#include "M5Chain.h"
#define RXD_PIN GPIO_NUM_5 // 47 for the other side of Chain DualKey
#define TXD_PIN GPIO_NUM_6 // 48 for the other side of Chain DualKey
Chain M5Chain;
device_list_t *device_list = NULL;
uint16_t device_count = 0;
uint8_t opr_status = 0;
int16_t encoder_value;
int16_t encoder_incre;
uint8_t button_status;
chain_button_press_type_t button_press_type;
void setup() {
Serial.begin(115200);
delay(1000);
Serial.println("===========================");
Serial.println("M5Stack Chain Encoder Test");
M5Chain.begin(&Serial2, 115200, RXD_PIN, TXD_PIN);
while (!M5Chain.isDeviceConnected()) {
Serial.println("No device connected");
delay(1000);
}
M5Chain.getDeviceNum(&device_count);
device_list = (device_list_t *)malloc(sizeof(device_list_t));
device_list->count = device_count;
device_list->devices = (device_info_t *)malloc(sizeof(device_info_t) * device_count);
M5Chain.getDeviceList(device_list);
if (device_list->devices[0].device_type == CHAIN_ENCODER_TYPE_CODE) {
Serial.println("ID[1] is Chain Encoder\n");
delay(1000);
} else {
Serial.println("ID[1] is NOT Chain Encoder\n");
return;
}
// Device ID, double click interval (100MS/200MS/.../900MS/1000MS), long press interval (3S/4S/.../9S/10S), operation status pointer
M5Chain.setEncoderButtonTriggerInterval(1, BUTTON_DOUBLE_CLICK_TIME_500MS, BUTTON_LONG_PRESS_TIME_5S, &opr_status);
Serial.println("Set double and long press intervals");
// Device ID, increment direction (AB = clockwise, BA = counterclockwise), operation status pointer
M5Chain.setEncoderABDirect(1, ENCODER_AB, &opr_status);
Serial.println("Set increment direction\n");
delay(1000);
}
void loop() {
M5Chain.getEncoderValue(1, &encoder_value); // Device ID
Serial.print("encoder_value:");
Serial.println(encoder_value);
M5Chain.getEncoderIncValue(1, &encoder_incre); // Device ID
Serial.print("encoder_incre:");
Serial.println(encoder_incre);
M5Chain.getEncoderButtonStatus(1, &button_status); // Device ID
Serial.print("button_status:");
Serial.println(button_status);
while (M5Chain.getEncoderButtonPressStatus(1, &button_press_type)) { // Device ID
switch (button_press_type) {
case CHAIN_BUTTON_PRESS_SINGLE:
Serial.println("Single pressed");
M5Chain.resetEncoderValue(1, &opr_status); // Device ID
break;
case CHAIN_BUTTON_PRESS_DOUBLE:
Serial.println("Double pressed");
break;
case CHAIN_BUTTON_PRESS_LONG:
Serial.println("Long pressed");
break;
}
}
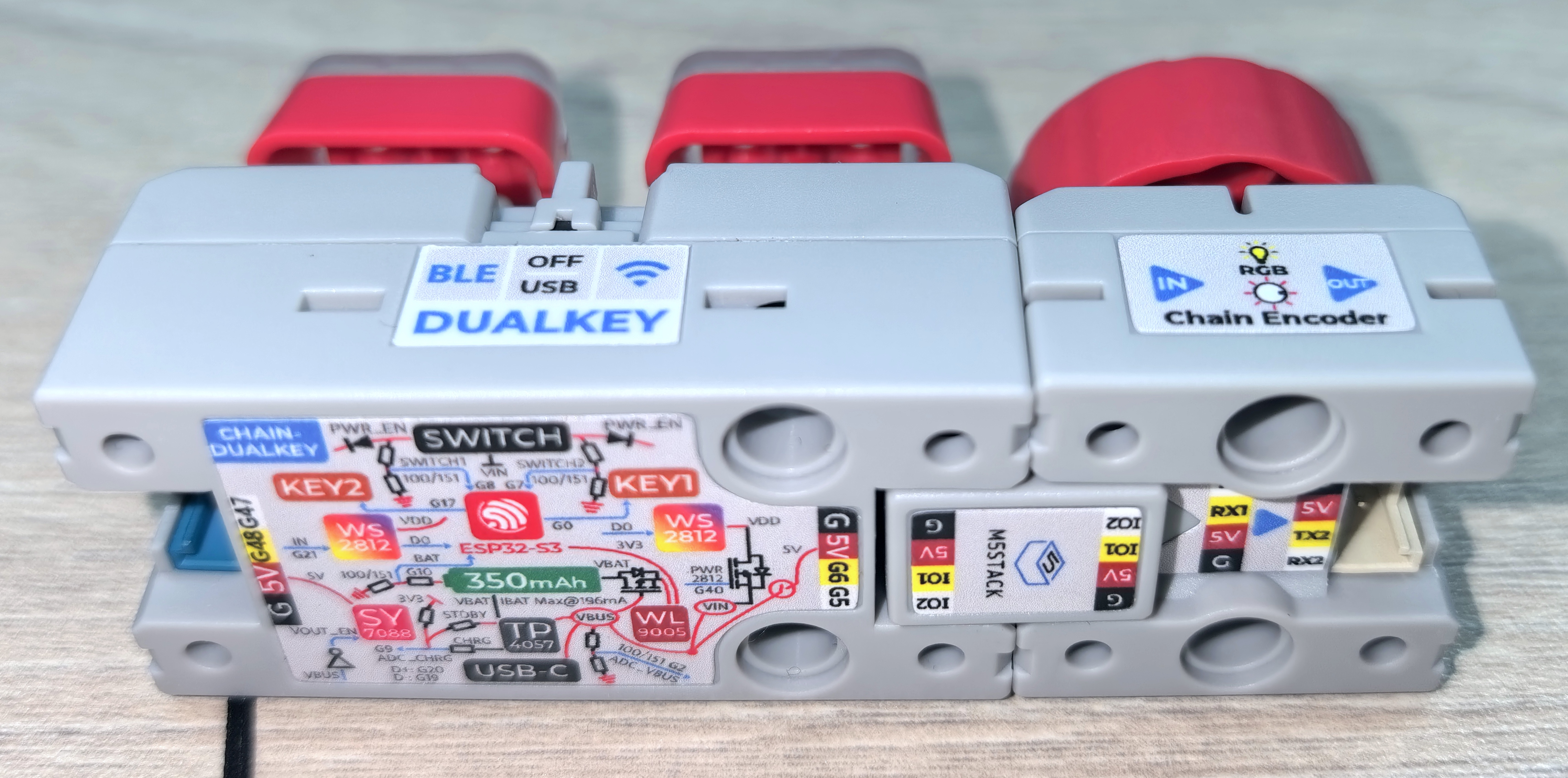
}Chain Bridge コネクタを使用して、メインコントローラである Chain DualKey と Chain Encoder を接続します。接続時は方向に注意し、三角形の矢印がメインコントローラ Chain DualKey から外側へ向くようにしてください(下図参照):
上記のプログラムをデバイスにコンパイルして書き込みます。Arduino IDE 右上のボタンをクリックして、「シリアルモニタ」と「シリアルプロッタ」を開きます。その状態で Chain Encoder のノブを回すと、次の情報が表示されます:
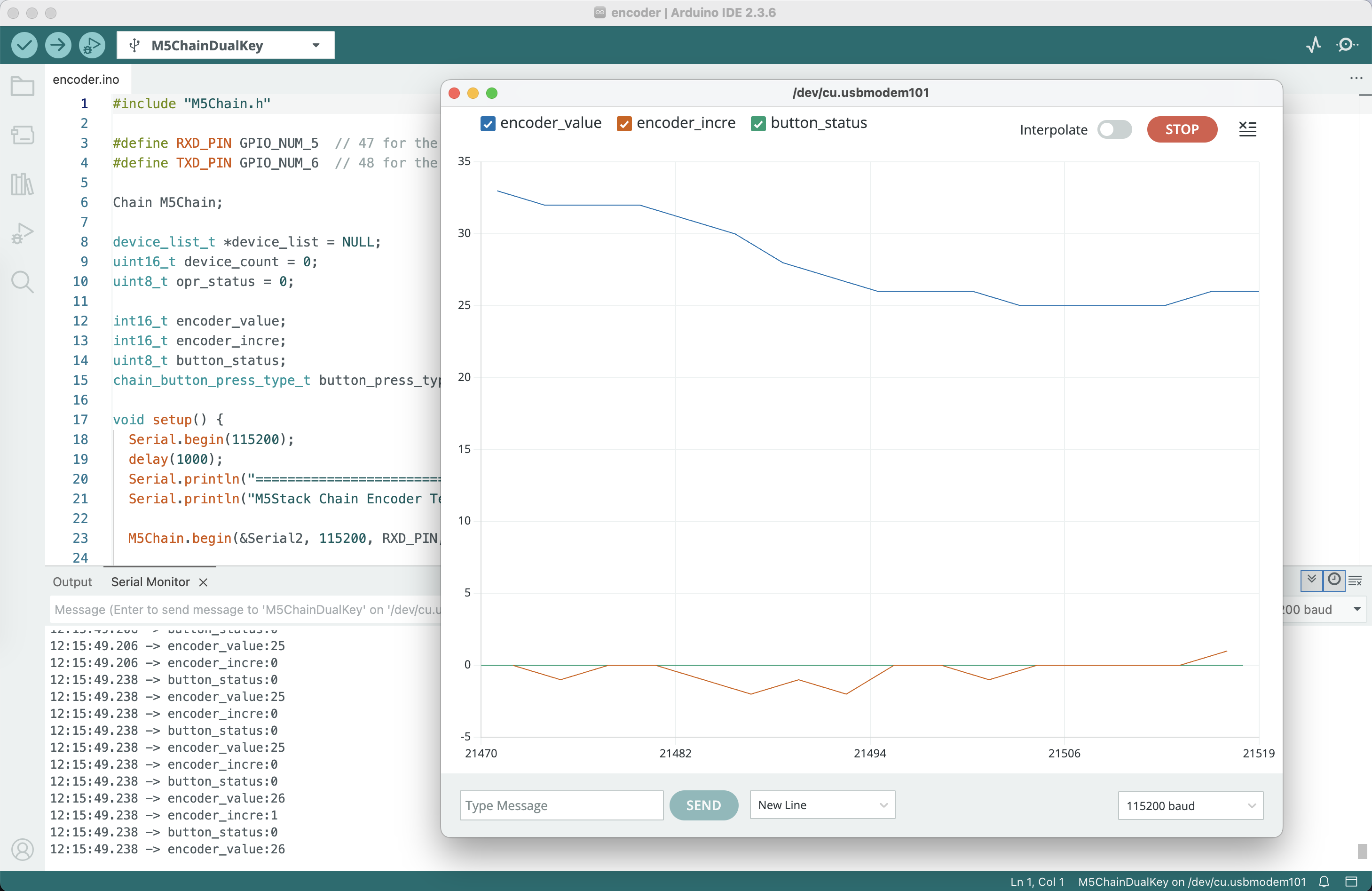
encoder_value:ノブの現在値encoder_incre:今回のステップでのノブの変化量button_status:ノブが押されているかどうか- ノブのシングルクリック/ダブルクリック/長押しイベント
- 本サンプルでは、ノブをシングルクリックすると
encoder_valueが 0 にリセットされます setup関数の最後の部分では、ノブのダブルクリック・長押しの判定時間や、ノブ回転時の値の変化方向(時計回りで増加/反時計回りで増加)を設定できます
3. 参考リンク
Page Tools